|
Hi, I'm Liuao Pei. I am currently a first-year Ph.D. student in The University of Hong Kong, fortunately supervised by Prof. Ping Luo at the MMLAB@HKU. Earlier, I obtained my Master's degree at FAST-Lab of Zhejiang University under the supervision of Prof. Fei Gao. Before this, I obtained my Bachelor of Engineering degree from Harbin Institute Of Technology. During my undergraduate studies, I was a team member of the HIT Competitive Robotics Team (HITCRT).My primary interests are in planning and dexterous manipulation, aiming to enable robots to effectively navigate and interact with the physical world in complex environments.
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
We achieved high-mobility racing flight using only onboard vision and IMU in complex and dynamic environments and won the championship with a time of 22.0 seconds, less than half of the second-place time. |
|
|
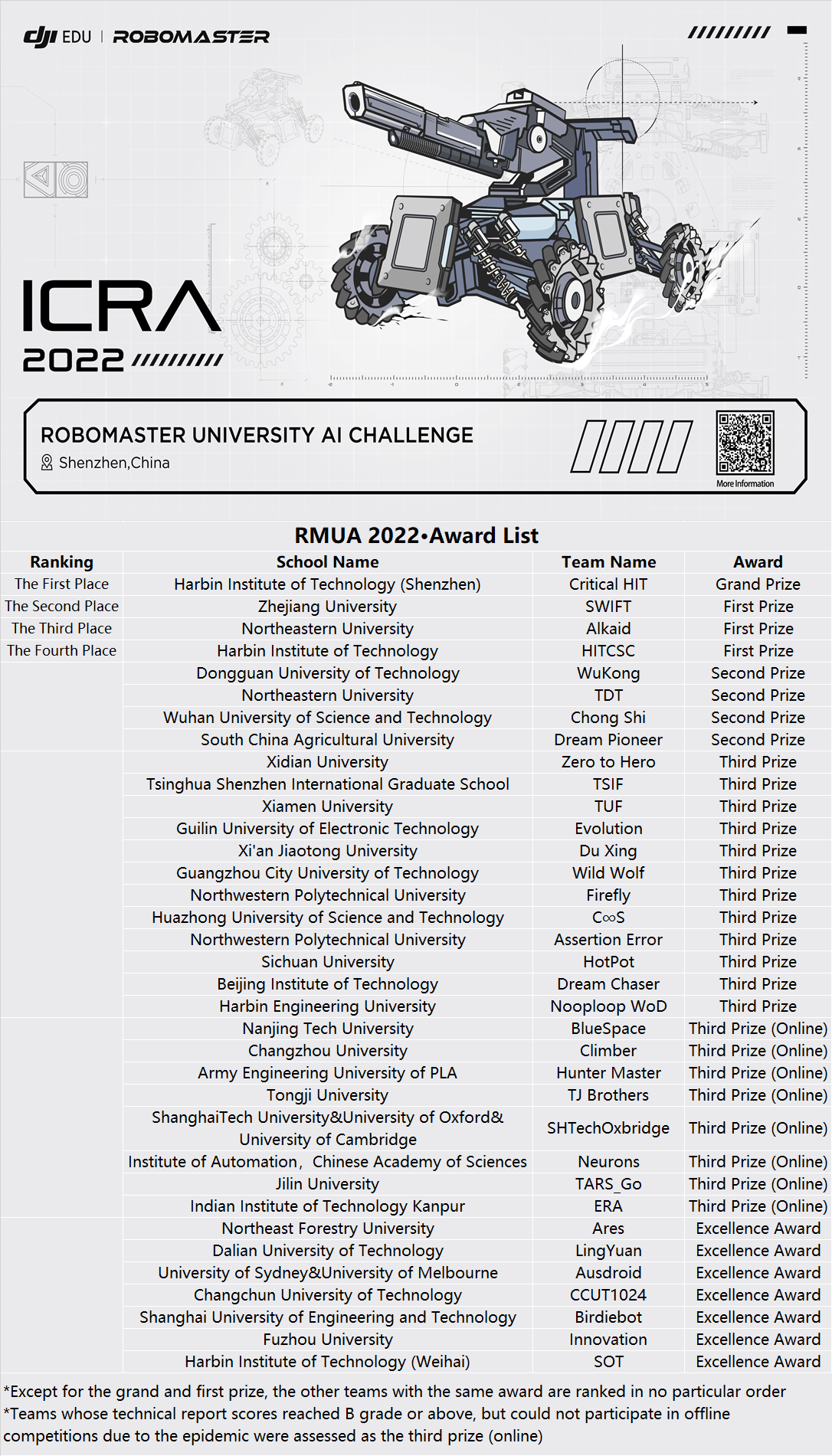
Came early to the FAST lab at Zhejiang University to lead the lab team of 8 members, which is the first year of participation. Based on the mechanical foundation of the official Infantry Robot, we choose sensors and computing platforms, design and develop the robot's localization, planning, visual servoing, decision-making and perception algorithms , which enable the robots to full-automatically complete the 2v2 shooting confrontation match on the field of play, and ultimately obtain the national runner-up achievement. |
|
|
Led a team of over 50 members for one year, focusing on the R\&D of 7 different types of robots. Implementing a robot-versus-robot match similar to the League of Legends mechanism, with 4 iterative cycles during the one-year preparation phase. The final result was the preparation of a 12-agent robotic team for the national competition, achieving stable performance, strong team cohesion, and effective problem-solving skills, resulting in a national runner-up finish. |
|
|
The competition lasted nearly a year and achieved National 6th. During this period, mainly responsible for the control algorithm and software of the Sentinel Robot. Multi-task fully automated function realization of the dual gimbal launching mechanism automatic targeting, chassis movement, power control, communication and decision making of the Sentinel Robot is realized. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
|
Last update: 2024.11.12. |